
Shield L293D para Arduino












Shield L293D para Arduino
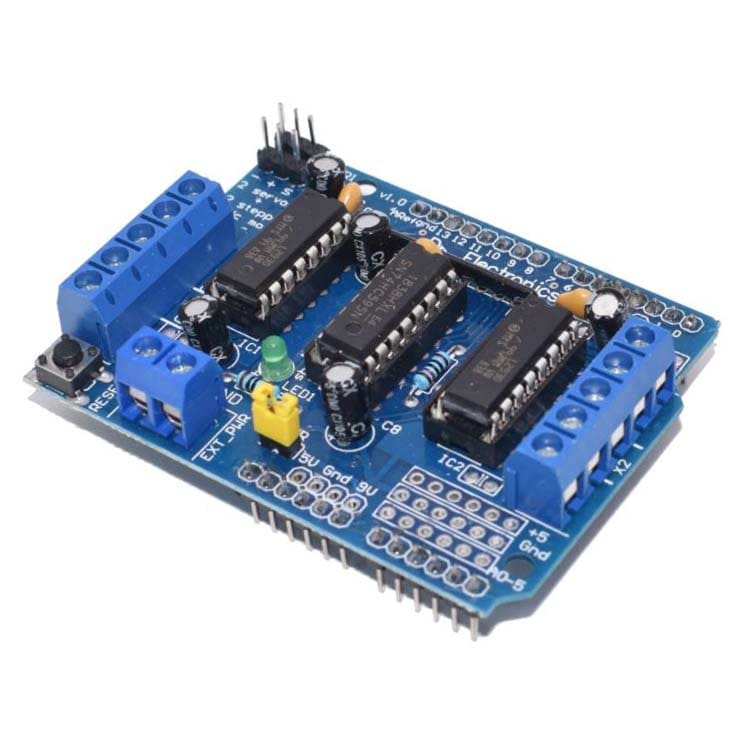
Permite controlar hasta 4 motores DC (o 2 motores paso a paso) y 2 servomotores. Compatible con Arduino Uno, Mega y Leonardo.
- Código: #1463 | e5, 1x4 - 1
- Categoría: Drivers/Controladores, Nuevos productos
Desplázate hacia abajo para encontrar más información.

Estado:
Disponible
Stock: 12
Stock: 12
$15.000
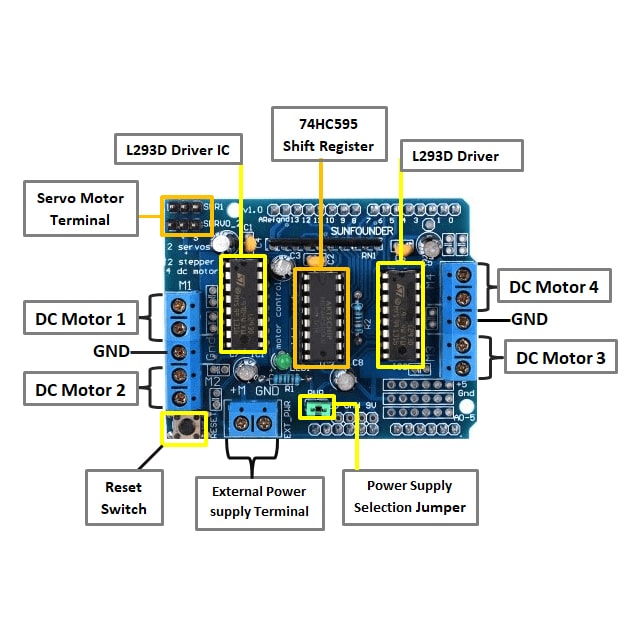
La shield L293D está conformada por 2 drivers L293D y un registro de desplazamiento 74HC595, el cual permite controlar los drivers L293D con menos pines de los que normalmente se requerirían.
Debido a que los servos conectados a la shield son alimentados con la salida de 5V del arduino, no es recomendable conectar servos grandes, ya que posiblemente el regulador interno no sea capaz de suministrar la corriente requerida, provocando que el Arduino se reinicie constantemente.
Si se van a emplear motores o cargas inductivas, es recomendable alimentar la shield con una fuente de voltage externa. Ya sea una conectada a la entrada JACK DC del Arduino, o una conectada a la entrada DC de la shield. Para este último caso, se debe retirar el jumper "EXT_PWR" de la shield, de lo contrario se generaría un cortocircuito.
Especificaciones:
Debido a que los servos conectados a la shield son alimentados con la salida de 5V del arduino, no es recomendable conectar servos grandes, ya que posiblemente el regulador interno no sea capaz de suministrar la corriente requerida, provocando que el Arduino se reinicie constantemente.
Si se van a emplear motores o cargas inductivas, es recomendable alimentar la shield con una fuente de voltage externa. Ya sea una conectada a la entrada JACK DC del Arduino, o una conectada a la entrada DC de la shield. Para este último caso, se debe retirar el jumper "EXT_PWR" de la shield, de lo contrario se generaría un cortocircuito.
Especificaciones:
- Voltaje de operación: 4.5VDC - 24VDC
- Corriente de salida (por canal): 600mA, 1.2A pico
- Frecuencia de PWM: Hasta 5KHz
- Pinout Arduino:
-Arduino pin 4: DIR_CLK
-Arduino pin 7: DIR_EN
-Arduino pin 8: DIR_SER
-Arduino pin 12: DIR_LATCH
-Arduino pin 11: PWM_Motor1
-Arduino pin 3: PWM_Motor2
-Arduino pin 6: PWM_Motor3
-Arduino pin 5: PWM_Motor4
-Arduino pin 9: Servo_1
-Arduino pin 10: Servo_2
El paquete incluye:
- 1 x Shield L293D
La shield L293D está conformada por 2 drivers L293D y un registro de desplazamiento 74HC595, el cual permite controlar los drivers L293D con menos pines de los que normalmente se requerirían.
Debido a que los servos conectados a la shield son alimentados con la salida de 5V del arduino, no es recomendable conectar servos grandes, ya que posiblemente el regulador interno no sea capaz de suministrar la corriente requerida, provocando que el Arduino se reinicie constantemente.
Si se van a emplear motores o cargas inductivas, es recomendable alimentar la shield con una fuente de voltage externa. Ya sea una conectada a la entrada JACK DC del Arduino, o una conectada a la entrada DC de la shield. Para este último caso, se debe retirar el jumper "EXT_PWR" de la shield, de lo contrario se generaría un cortocircuito.
Especificaciones:
Debido a que los servos conectados a la shield son alimentados con la salida de 5V del arduino, no es recomendable conectar servos grandes, ya que posiblemente el regulador interno no sea capaz de suministrar la corriente requerida, provocando que el Arduino se reinicie constantemente.
Si se van a emplear motores o cargas inductivas, es recomendable alimentar la shield con una fuente de voltage externa. Ya sea una conectada a la entrada JACK DC del Arduino, o una conectada a la entrada DC de la shield. Para este último caso, se debe retirar el jumper "EXT_PWR" de la shield, de lo contrario se generaría un cortocircuito.
Especificaciones:
- Voltaje de operación: 4.5VDC - 24VDC
- Corriente de salida (por canal): 600mA, 1.2A pico
- Frecuencia de PWM: Hasta 5KHz
- Pinout Arduino:
-Arduino pin 4: DIR_CLK
-Arduino pin 7: DIR_EN
-Arduino pin 8: DIR_SER
-Arduino pin 12: DIR_LATCH
-Arduino pin 11: PWM_Motor1
-Arduino pin 3: PWM_Motor2
-Arduino pin 6: PWM_Motor3
-Arduino pin 5: PWM_Motor4
-Arduino pin 9: Servo_1
-Arduino pin 10: Servo_2
El paquete incluye:
- 1 x Shield L293D
Productos relacionados

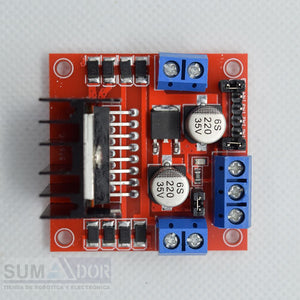
Permite controlar la dirección y velocidad de hasta 2 motores DC. Es posible conectar los 2 canales en paralelo para obtener 1 canal con más capacidad de corriente.
$14.600

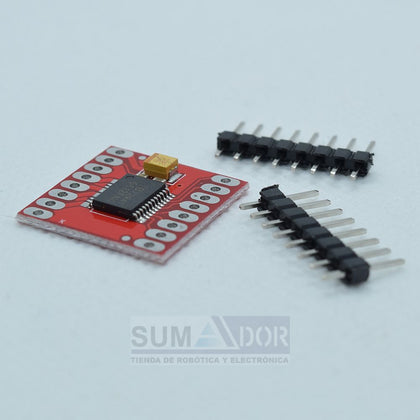
Permite controlar la dirección y velocidad de hasta 2 motores DC. Utiliza Mosfets como llaves de conmutación, por lo que genera menos calor que el L298N y es más eficiente.
$12.000


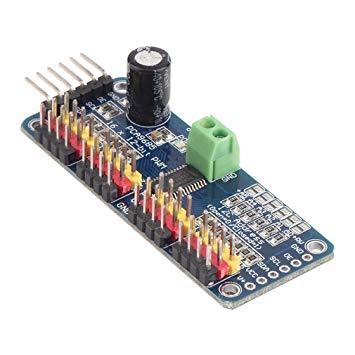
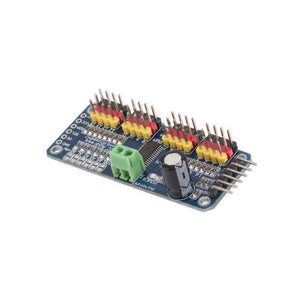
Permite controlar hasta 16 canales PWM por medio de una conexión I2C. Al ser posible configurar su dirección, se pueden conectar múltiples tarjetas en paralelo.
Agotado
Consiste en un array de 7 transistores darlington NPN con salidas a colector abierto. Sus aplicaciones incluyen control de cargas resistivas, motores de escobillas, motores paso a paso, etc.
$1.100